
- 非IC关键词
企业档案
- 相关证件:

- 会员类型:普通会员
- 王小姐

- 电话:010-82899827
- 手机:13911180502
- 地址:上地南口科贸大厦412室
- 传真:010-82899827
- E-mail:wwran520@163.com
产品分类
您的当前位置:北京聚英翱翔电子有限公司 > 元器件产品

产品信息
- 五个拨码全都拨到“ON”位置时,为地址“1”;
- 五个拨码全都拨到“OFF”位置时,为地址“32”;
- 左边1为二进制位。
- 地址表:
-

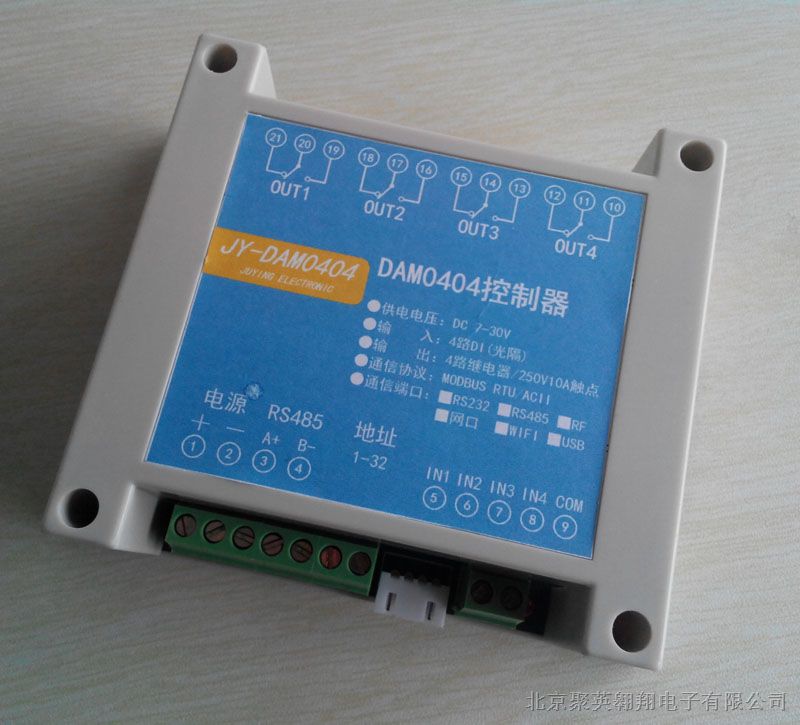
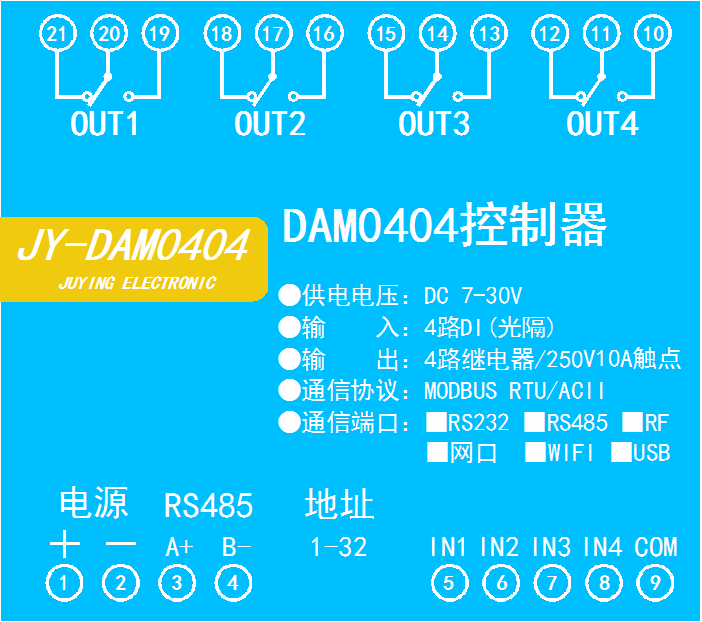
产品功能及特点:
◆宽压供电
◆通讯隔离,控制驱动隔离
◆通讯方式支持RS485。
◆支持标准modbus协议,同时支持ASCII/RTU格式
◆宽压供电
◆通讯隔离,控制驱动隔离
◆通讯方式支持RS485。
◆支持标准modbus协议,同时支持ASCII/RTU格式
产品功能








 即 寄存器30009数据 的bit8 与寄存器00001的数据一样。
即 寄存器30009数据 的bit8 与寄存器00001的数据一样。
同理:光耦输入也是如此。寄存器30003的bit8、bit9 与寄存器10001、10002都对应到指定的硬件上。
寄存器地址按照PLC命名规则,真实地址为去掉位,然后减一。


详解:
1:继电器查询
查询4路继电器
FE C6




◆继电器状态查询
◆继电器独立控制
◆继电器整体控制
◆ 四路继电器控制,4路DI输入,可联动控制。
◆ 支持5位寻址地址
◆ RS485支持波特率:2400,4800,9600,19200,38400
产品选型:
产品选型:
主要参数:
接口说明
接线方式
继电器接线方式
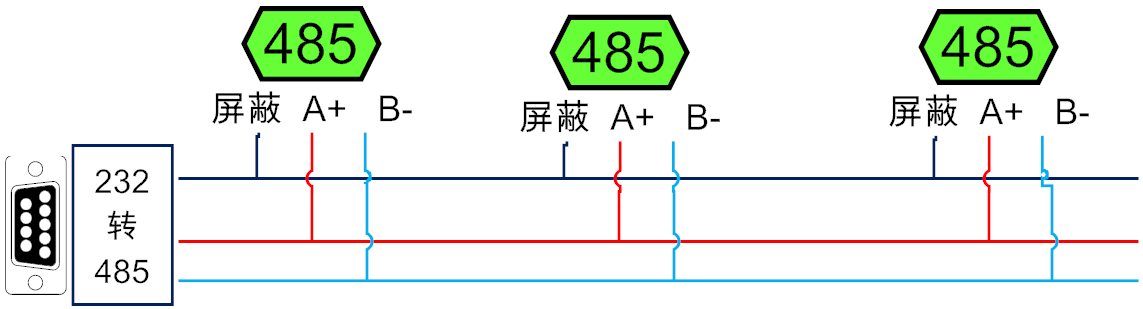
RS485级联接线方式
地址说明
寄存器说明:
本控制卡主要为线圈寄存器,主要支持以下指令码:1、5、15
本控制卡主要为线圈寄存器,主要支持以下指令码:1、5、15
线圈寄存器地址表:
备注:
①:Modbus设备指令支持下列Modbus地址:
00001至09999是离散输出(线圈)
10001至19999是离散输入(触点)
30001至39999是输入寄存器(通常是模拟量输入) 40001至49999是保持寄存器(预留)
采用5位码格式,个字符决定寄存器类型,其余4个字符代表地址。地址1从0开始,如00001对应0000。
②:波特率数值对应表
③:继电器状态,通过30002地址可以查询,也可以通过00001---00002地址来查询,但控制只能使用00001---00002地址。
30002地址数据长度为16bit。多可表示16个继电器。
对应结果如下:
30002地址数据长度为16bit。多可表示16个继电器。
对应结果如下:
同理:光耦输入也是如此。寄存器30003的bit8、bit9 与寄存器10001、10002都对应到指定的硬件上。
寄存器地址按照PLC命名规则,真实地址为去掉位,然后减一。
波特率更改方法
1. 打开“16路继电器控制软件”,串口设定栏选择好4个对应实际设备的参数后点击打开串口,然后点击 “波特率读取”。
在232波特率选项中选择对应的波特率后点击“波特率设置”。配置完成后立即生效,所以需要关闭串口后重新选择配置的波特率再测试。
在232波特率选项中选择对应的波特率后点击“波特率设置”。配置完成后立即生效,所以需要关闭串口后重新选择配置的波特率再测试。
通讯格式
本产品支持标准modbus指令,有关详细的指令生成与解析方式,可根据本文中的寄存器表结合参考《MODBUS协议中文版》 即可。
本产品同时支持modbus ASCII/RTU 格式。
应用举例及其说明:本机地址除了拨码开关地址之外,还有默认的254为广播地址。当总线上只有一个设备时,无需关心拨码开关地址,直接使用254地址即可,当总线上有多个设备时通过拨码开关选择为不同地址,发送控制指令时通过地址区别。
指令生成说明:对于下表中没有的指令,用户可以自己根据modbus协议生成,对于继电器线圈的读写,实际就是对modbus寄存器中的线圈寄存器的读写,上文中已经说明了继电器寄存器的地址,用户只需生成对寄存器操作的读写指令即可。例如读或者写继电器1的状态,实际上是对继电器1对应的线圈寄存器0001的读写操作。
详解:
1:继电器查询
查询4路继电器
FE C6
继电器卡返回信息:
FE 01 01 00 61 9C
2:查询光耦
FE 02 00 00 00 01 AD C5
FE 02 00 00 00 01 AD C5
光耦返回信息:
FE 02 01 00 91 9C
FE 02 01 00 91 9C
软件说明
软件功能:
◆继电器独立控制
◆继电器整体控制
常见问题与解决方法
1、继电器板卡供电后使用232接口无法建立通信,无法控制
首先测试不同波特率是否可以控制,485接口注意A+、B-线以及屏蔽线,屏蔽线不是必须,但在通信误码率大的情况下必须接上,即便距离很近也可能出现此类情况。
2、485总线,挂载了大于1个的设备,我以广播地址255发送继电器1吸和,但并不是所有模块的继电器1吸和。
广播地址在总线上只有一个设备时可以使用,大于1个设备时请以拨码开关区分地址来控制,否则会因为模块在通信数据的判断不同步上导致指令无法正确执行。